
搜索结果: 1-15 共查到“SLAM”相关记录56条 . 查询时间(0.125 秒)

第五届全国SLAM技术论坛圆满结束(图)
第五届 SLAM技术 大模型 人工智能
2024/9/23
2024年8月2日-4日,第五届全国SLAM技术论坛在西北工业大学长安校区成功举办。本届论坛由中国图象图形学学会(CSIG)主办,西北工业大学、CSIG三维视觉专委会、陕西省信息获取与处理重点实验室联合承办,深蓝学院协办。来自SLAM及相关领域学术界、企业界的600余位同仁齐聚一堂,大会聚焦SLAM和相关技术的前沿发展以及在应用领域的行业机会,以“大模型与SLAM2.0”为主题,旨在为SLAM技术...
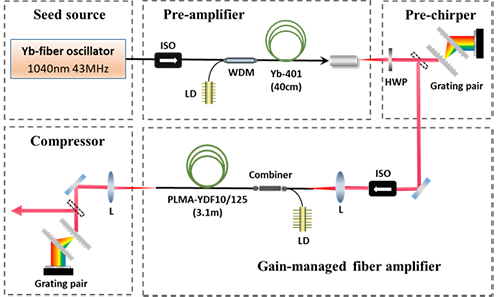
作为一种无标记成像技术,多模态非线性光学成像(NLOI)已成为癌症评估的有力工具。为了避免与多模态NLOI相关的运动伪影和光损伤,一种解决方案是使用单个超快激光作为激发源,结合多个检测通道来收集不同模态的信号观察不同的生物分子。但是在这种情况下,每种模态无法独立优化,需要一个合适的激发源来激发所有NLOI模态。无标记自发荧光多倍频 (SLAM) 显微镜是将激发波长设置在1110nm,可以实现在单一...
近日,上海科技大学信息学院自动化与机器人中心(以下简称STAR 中心)在视觉感知、机器人操控、视觉实时定位与建图(SLAM)等领域取得多项研究成果,相关论文被2023 IEEE/RSJ International Conference on Intelligent Robots and Systems(以下简称:IROS 2023)接收。

2023中国SLAM竞赛圆满结束:推动SLAM技术创新,助力实际应用落地(图)
SLAM竞赛 SLAM 技术创新
2023/11/20
2023中国SLAM竞赛作为第四届全国SLAM技术论坛的一个重要活动,于2023年7月23日在厦门大学圆满结束。本届竞赛由中国图象图形学学会(CSIG)主办,厦门大学和CSIG三维视觉专业委员会联合承办,旨在促进我国SLAM技术面向实际应用需求的成果转化,聚焦解决企业在实际场景中面临的SLAM难题,并积极助力企业吸纳更多相关优秀人才。SLAM竞赛共设两个赛道:VI-SLAM赛道和LiDAR-SLA...

第四届全国SLAM技术论坛圆满落幕(图)
第四届 SLAM 三维
2023/11/18
2023年7月22日-23日,第四届全国SLAM技术论坛在厦门大学隆重召开。本届论坛由中国图象图形学学会主办,厦门大学、CSIG三维视觉专委会联合承办,国际摄影测量与遥感学会、深蓝学院协办。来自SLAM及相关领域学术界、企业界的660余位同仁齐聚一堂,共同探讨SLAM和相关领域的前沿发展趋势,开展技术理论与实际落地的思想碰撞。

第三届全国SLAM技术论坛成功举办(图)
第三届 全国SLAM技术论坛 SLAM 三维视觉
2022/9/19
2022年7月16日-17日,“第三届全国SLAM技术论坛”成功举办,本次论坛由中国图象图形学学会主办,中国图象图形学学会三维视觉专委会和深蓝学院承办,图森未来、追觅科技协办。论坛邀请了22位学术界和企业届的专家围绕SLAM技术的研究、发展以及产业化应用作报告分享,吸引了来自全国各地4000多位领域爱好者参加此次活动,线上直播火爆,观众互动热情!
基于激光SLAM的牧场智能推翻草机器人
西北农林科技大学新农村发展研究院 牧场智能推翻草机器人
2022/9/29
近年来,我国奶牛产业发展迅猛并稳步转型升级,传统饲喂方式已无法提高养殖效益,因此如何提高养殖场的现代化饲喂水平,是我国畜牧业发展的一项重要研究内容。
基于视觉SLAM机器人的田间场景实时重建
西北农林科技大学 新农村发展研究院 视觉SLAM机器人 田间场景实时重建
2022/9/21
该成果在技术上属于视觉SLAM(同时定位与地图构建)领域,在应用上属于智慧农业田间场景自动重建与识别定位领域。
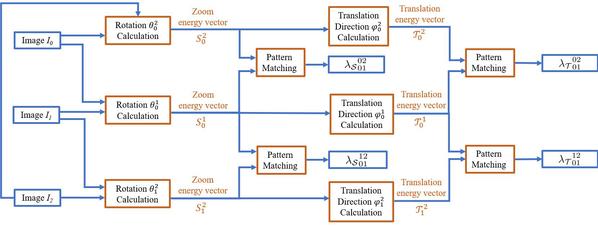
针对移动机器人视觉同步定位与地图创建中由于相机大角度转动造成的帧间匹配失败以及跟踪丢失等问题,提出了一种基于局部图像熵的细节增强视觉里程计优化算法.建立图像金字塔,划分图像块进行均匀化特征提取,根据图像块的信息熵判断其信息量大小,将对比度低以及梯度变化小的图像块进行删除,减小图像特征点计算量.对保留的图像块进行亮度自适应调整,增强局部图像细节,尽可能多地提取能够表征图像信息的局部特征点作为相邻帧匹...
淋巴细胞信号活化分子(SLAM)是小反刍兽疫病毒(PPRV)在淋巴细胞的主要受体。本研究旨在探索PPRV感染细胞源外泌体对山羊SLAM表达的影响。通过荧光定量PCR法、流式细胞术和Western blot技术检测PPRV疫苗毒株N75-1感染山羊外周血单核细胞(PBMCs)源外泌体(Exo-PPRV)共育对接纳细胞(正常山羊PBMCs)中SLAM表达水平和细胞因子分泌水平的影响。结果表明,与正常细...
为研究山羊源novel_miR218对小反刍兽疫病毒(PPRV)在淋巴细胞的主要受体――淋巴细胞信号活化分子(SLAM)表达水平的调节作用,通过荧光定量PCR法和Western blot技术检测PPRV疫苗毒N75-1株接种山羊外周血单核细胞(PBMCs)中SLAM和novel_miR218表达变化以及病毒增殖水平,然后检测novel_miR218模拟物(novel_miR218 mimic)和拮...
旨在构建稳定表达SLAM受体的SLAM-Vero细胞系和SLAM-BHK21细胞系,并比较其对犬瘟热病毒(CDV)野毒株的敏感性,为CDV野毒株的快速分离与研究提供一种有效的工具。将真核表达载体Pcag-SLAM分别转染Vero细胞和BHK21细胞。经G418压力筛选结合有限稀释法筛选阳性克隆株,并通过RT-PCR、间接免疫荧光鉴定(IFA)和Western blot等方法对稳定表达SLAM受体的...
“TORINO 1911” PROJECT: A CONTRIBUTION OF A SLAM-BASED SURVEY TO EXTENSIVE 3D HERITAGE MODELING
SLAM photogrammetry LiDAR Zeb Revo RT Mobile Mapping Systems landscape Cultural Heritage
2018/6/4
In the framework of the digital documentation of complex environments the advanced Geomatics researches offers integrated solution and multi-sensor strategies for the 3D accurate reconstruction of str...
OPEN PIT MINE 3D MAPPING BY TLS AND DIGITAL PHOTOGRAMMETRY: 3D MODEL UPDATE THANKS TO A SLAM BASED APPROACH
TLS digital photogrammetry open pit mine SLAM mapping automatic localization
2018/6/5
The state of the art of 3D surveying technologies, if correctly applied, allows to obtain 3D coloured models of large open pit mines using different technologies as terrestrial laser scanner (TLS), wi...
A VARIANT OF LSD-SLAM CAPABLE OF PROCESSING HIGH-SPEED LOW-FRAMERATE MONOCULAR DATASETS
monocular visual odometry filter-based visual odometry Augmented Reality
2018/3/6
We develop a new variant of LSD-SLAM, called C-LSD-SLAM, which is capable of performing monocular tracking and mapping in high-speed low-framerate situations such as those of the KITTI datasets. The m...